





Graphical Abstract
Rojahn A., N. Schenk, P.-J. van Leeuwen and P. Roland, 2023: Particle filtering and gaussian mixtures - On a Localized Mixture Coefficients Particle Filter (LMCPF) for global NWP. J. Meteor. Soc. Japan, 101.
Editor's Highlight
https://doi.org/10.2151/jmsj.2023-015
Early Online Release
Graphical Abstract NEW GA
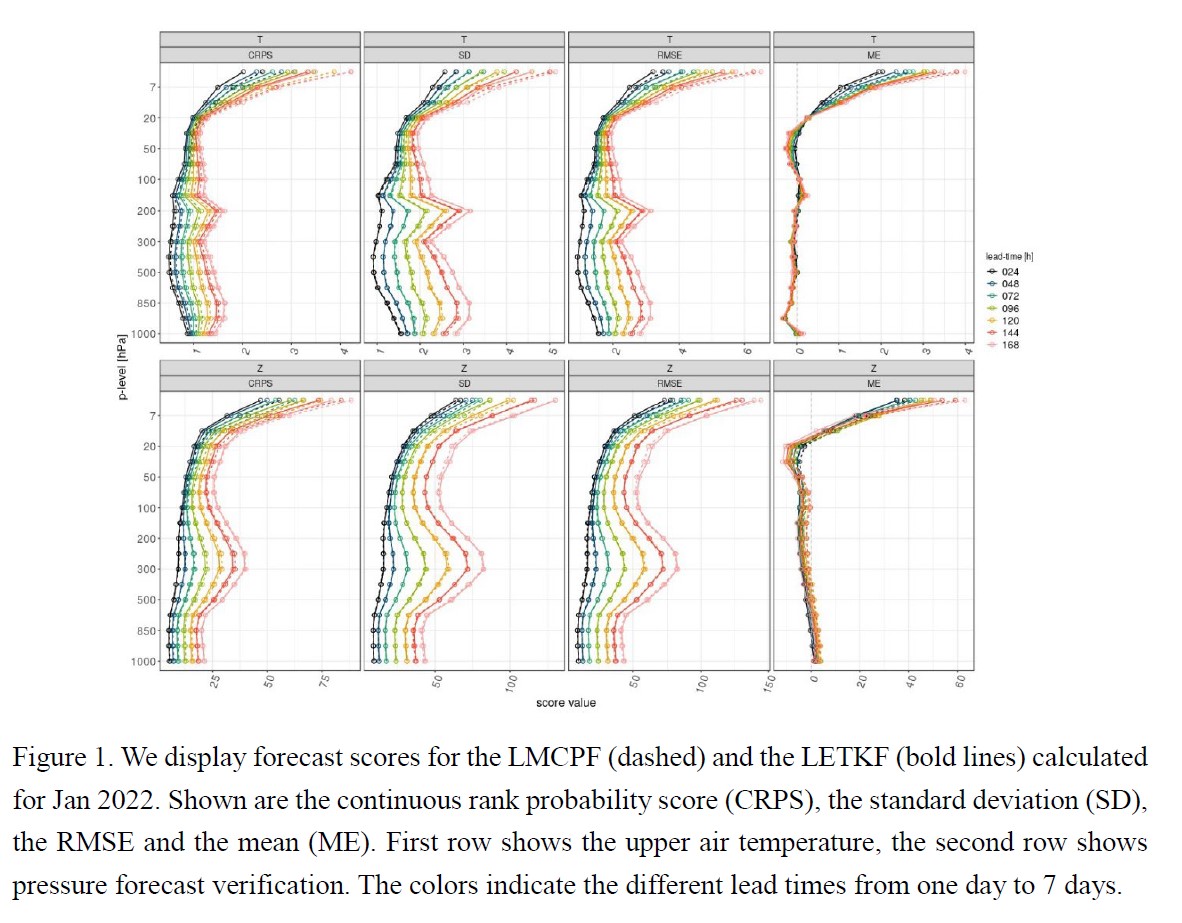
Plain Language Summary: In a global numerical weather prediction (NWP) modeling framework the implementation of a particle filter with Gaussian uncertainty of individual particles is investigated. We demonstrate the feasibility and quality of the Localized Mixture Coefficients Particle Filter (LMCPF) and evaluate the relationship between prior and posterior distributions and observations. The mixture approach is able to achieve high-quality with a low number of particles with in a real-world framework showing NWP scores comparable to the LETKF.
Highlights:
- The Localized Mixture Coefficients Particle Filter (LMCPF), a combination of the LAPF and a localized version of a Gaussian mixture, is formulated.
- The Experiments were carried out with a 52km resolution and a period of one month in the global operational high dimensional NWP model ICON of DWD.
- Results show that the LMCPF can reach the quality of the LETKF. This shows that using uncertainty for each particle can be an important tool to achieve high-quality particle filters.