





Graphical Abstract
Tsuyuki, T., and R. Tamura, 2022: Nonlinear data assimilation by deep learning embedded in an ensemble Kalman filter. J. Meteor. Soc. Japan, 100, 533-553.
https://doi.org/10.2151/jmsj.2022-027.
Graphical Abstract
Published
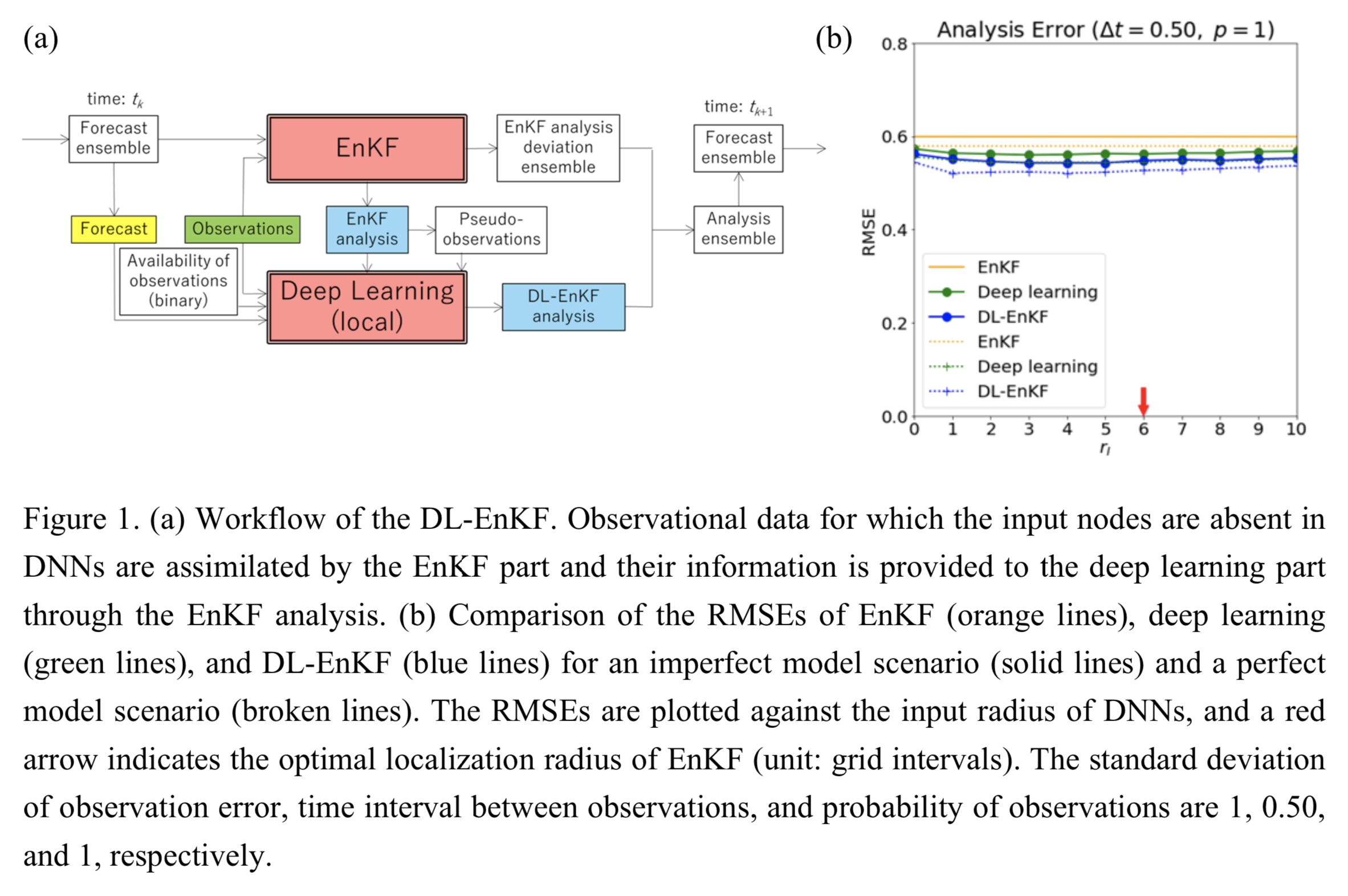
Plain Language Summary: As an alternative to the particle filter for high-dimensional systems, a nonlinear data assimilation method based on deep learning is proposed, in which deep neural networks (DNNs) are locally embedded in the ensemble Kalman filter (EnKF). This method is named the deep learning-ensemble Kalman filter (DL-EnKF). Results of data assimilation experiments using three versions of the Lorenz 96 model and an EnKF with a small ensemble show that the DL-EnKF is superior to the EnKF in terms of accuracy in strongly nonlinear regimes.
Highlights:
- The DL-EnKF analysis is more accurate than the output of deep learning because of positive feedback in assimilation cycles.
- Even if the target of training is an EnKF analysis with a large ensemble or a simulation by an imperfect model, the improvement introduced by the DL-EnKF is not very different from the case where the target of training is the true state.
- The inclusion of EnKF analysis in the inputs of DNNs not only improves the accuracy of deep learning but also reduces the optimal number of nodes per hidden layer and the dependence of the accuracy on the input radius.